2022.10.20
每月一篇博客就算成功
Smart-Contract-Based Economical Platooning in Blockchain-Enabled Urban Internet of Vehicles
区块链城市车联网中基于智能合约的经济车辆编队
论文发表于《IEEE Transactions on Industrial Informatics》,2019
第一作者为西安电子科技大学的陈晨老师
整体介绍
本文设计了一种无人驾驶车辆的车队模型,该模型将路径匹配成功的车辆划分为一个车队,由队长(PH)领导,并引入了PH选择方案以激励车辆成为PH。并使用智能合约实现PH和车队成员(PM)之间基于区块链的支付,避免虚假和恶意支付。
研究背景
随着城市和农村的快速发展,世界各地的汽车数量不断增加。道路变得越来越拥挤,直接导致了一系列社会和环境问题,如交通事故、通勤时间增加、资源浪费和环境污染。
随着自动驾驶的发展,智能交通将逐步取代传统的驾驶模式。在此基础上,用车队模型代替单车驾驶模式是解决上述问题的好办法。
一般来说,车队模型是指一个队长(PH)领导成员(PM)一起开车。PH和所有PM都有相同或相近的目的地,他们彼此之间保持一定的距离。小间距的一个明显优点是可以提高城市的交通容量,缓解交通拥堵。此外,车队模式降低了能耗,节省了5-20%的燃料成本。
待解决的问题
1.目的地相同的不同车辆,行驶的起点往往可能不同;同一个车队中的车辆可能只是暂时顺路,目的地不一定相同;车辆在行驶过程中可能出现突发情况需要提前退出车队……
因此,需要有一种能够保证车队成员能够动态加入/退出的机制。
2. 车队队长(PH)的驾驶员承担着关注驾驶情况的任务,而队员(PM)可以在车内休息,如果对PH没有激励机制,则驾驶员更愿意选择成为一名PM。
需要一个激励机制来鼓励车辆成为PH,同时在担任PH期间负起责任。
3.在车队创建时和行驶期间,车队的通信过程容易受到攻击,频繁的信息交互很容易导致信息泄露。
区块链可以为联网车提供安全和隐私保障,基于区块链技术的智能合约能够保证交易的安全。
论文创新点
本文在车辆编队技术方面的主要贡献如下:
1) 一种基于路径信息匹配的车辆编队机制,路径信息匹配成功的请求车辆可以加入合适的车队。
2) 一种计算声誉值以选择PH的方法。
3) 一种智能合约支付机制,迫使接受车队服务的车辆支付相应的服务费。
模型设计
假设
1)自由流交通状态下的城市道路模型和车辆流动模型等系统模型用于分析。
2)路边单元(RSU)分布广泛,部署有边缘云,可以实时传输和处理过往车辆上传的内容,基本满足每辆车的通信需求。
3)道路上的每辆车都配有车载单元(OBU),该单元执行简单计算,收集相关信息,并将其上传至RSU。
4)每辆车都有一个精度约为10米的GPS导航系统,可以获取距离信息和地理位置。
5)在车队模型中,每辆车都保存有自己的历史驾驶信息,车辆曾经经历过多次这样的行为,例如加入车队、离开车队、竞争成为PH、向PH付款、评估PH以及作为PH接受PM的评估。
系统模型/路径匹配机制
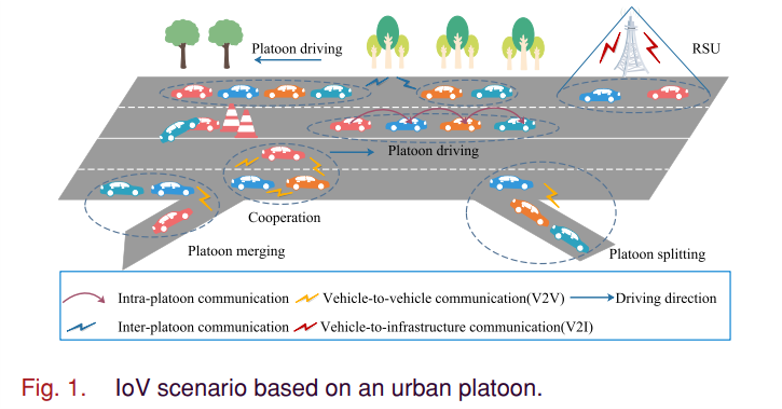
在图1所示的系统模型中,车辆以自由流状态沿街道行驶。图中展示了车队行驶、车辆加入车队、车辆离开车队,以及车辆和车辆、车辆和RSU交互的情况。此外,图中没有展示的信息如下:
1) RSU:RSU相互连接,并与覆盖区域内的每辆车无线连接。RSU实时更新车队信息并协助车队调度。
2) 初始PH:初始PH可以是单独在道路上行驶的车辆。
3) 车队的潜在成员:在加入车队之前,车辆都是潜在的车队成员(PPM)。
4)车队成员:PPM加入车队后,他们成为正式PM。
5) PH轮换:为了确保安全和公平,有条件地选择一名车队成员领导该车队。
车辆请求加入车队的过程
1.由电子地图生成由路段ID组成的路径信息,从而使得路径可以由一系列路段表示;
2.将路径信息提交给RSU以请求匹配车队。
车辆的路径信息表(PIT)如下图所示: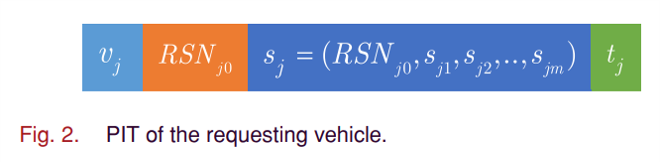
其中包含:
vj:车辆标识信息
RSNj0:请求服务节点(车辆当前所在的位置)
sj:车辆将要经过的道路节点集(车辆的预计行车路径)
tj:车辆能够容忍的等待延迟
车队对车辆请求的回复
当车辆和车队的路径信息匹配度较高时,车辆vj有机会加入车队pi。车队的路径信息si由其中车辆的路径信息组合而成。
车对的路径信息表(PIT)如下图所示: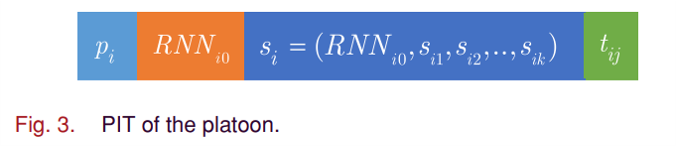
其中包含:
pi:车队标识信息
RNNi0:道路网络节点(车队当前的位置或即将到达的位置)
si:车队将要经过的道路节点集(车队的预计行车路径),si将会随着车队的行进而不断更新
tij:车队pi到达车辆vj处所需的时间
车辆加入车队后对车队路径信息的更新
如果车辆的路径集合sj的终点在车队路经集合si的终点之后,则车辆的加入将会导致车队路径信息更新,即集合si将会扩展。
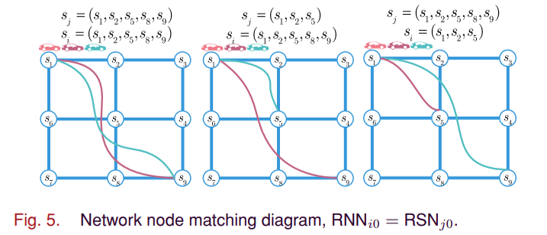
匹配度计算
车辆和车队路径的匹配度MDij由以下公式计算: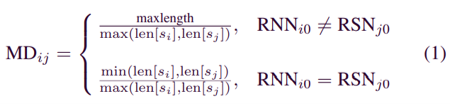
其中,maxlength可以由公式1算出: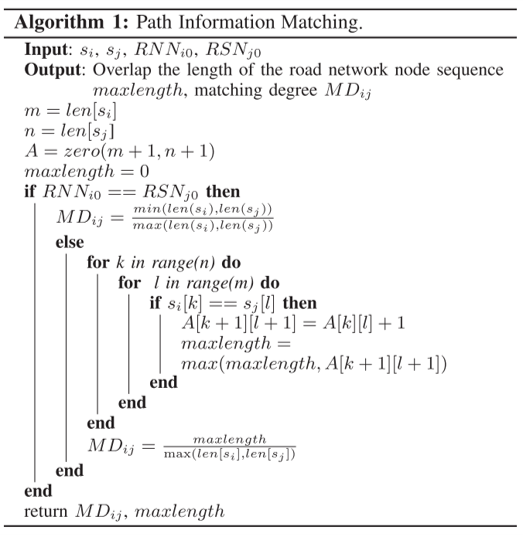
maxlength说人话就是车辆和车队顺路路段的最大距离。
定义α为匹配阈值(默认为1/2),则有如下3种匹配情况:
1. MDij<α,匹配失败,vj继续请求;
2. MDij>=α,但是tij>tj(即匹配度足够,但是pi无法在vj可以等待的时间内到达),匹配失败,vj继续请求;
3. MDij>=α,且tij<=tj,匹配成功,vj成为pi的成员vpi
PH选择机制
由于车队中的车辆不会永久地处于车队内,需要一种PH轮换选择机制来保证车队的持续运行。
为了找到有经验且可靠的车辆来担任PH,定义“声誉值”(Reputation)作为衡量标准,声誉值取决于PM对PH的评价。
当PM离开排/PH轮换时(图6),PM对PH的服务进行评估,PM的操作屏幕上将弹出评估窗口(就像对网约车司机打分),只需对每个问题选择星级,问题必须简短以便PM快速评价。预设计的一些问题如图7左侧(开车经验/危机处理/收费合理)。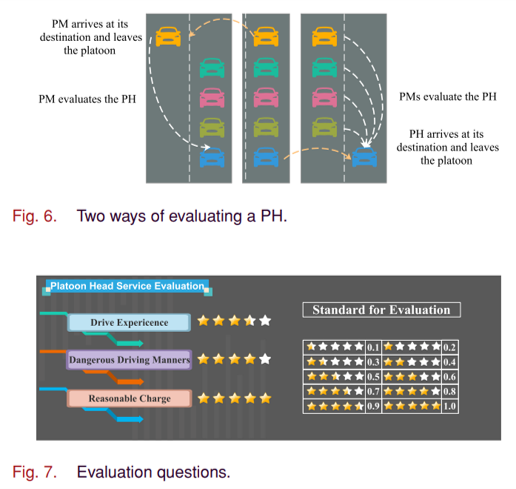
声誉值计算机制
打分的结果由公式2计算:
其中,𝑆𝐶𝑝ℎ𝑖^𝑣𝑗^是车队pi中,车辆vj对PH的最终评分,𝑆𝐶𝑘^𝑣𝑗^是车辆vj对第k道题目的评分,wk是每道题的权重。
由于评估分数一定分布在区间[0,1]内,评估分数可以用α=1的贝塔分布来拟合,贝塔分布的概率密度函数如下(用𝑆𝐶𝑝ℎ𝑖^𝑣𝑗^代替随机变量X):
评分均值rei和β的关系如公式4所示,然后据此对β进行最大似然估计得到β的估计值如公式5所示:
最终定义声誉值R如下:
其中R0=0.7是初始分数,M为车队车辆数,N为PH得到评价的次数。最终R值随着N和rei变化而变化。
计算并排序每辆车的最终声誉值。将声誉值和匹配度结合以确定PH的选择。当当前PH的匹配度MDij<1/2时应当更换PH,在其余MDij>=1/2的PM中选择声誉值最高的成为PH。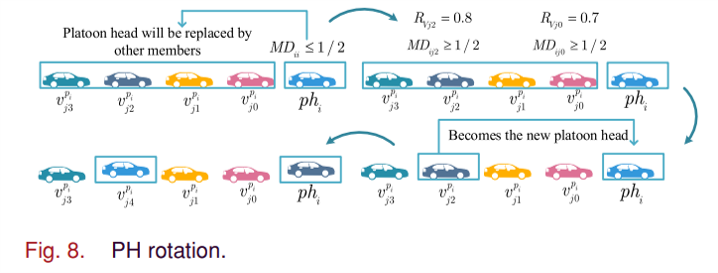
基于智能合约的安全通信
没看懂,这里汇报完老师给新任务了,摆了
下一篇智能汽车和5G相关
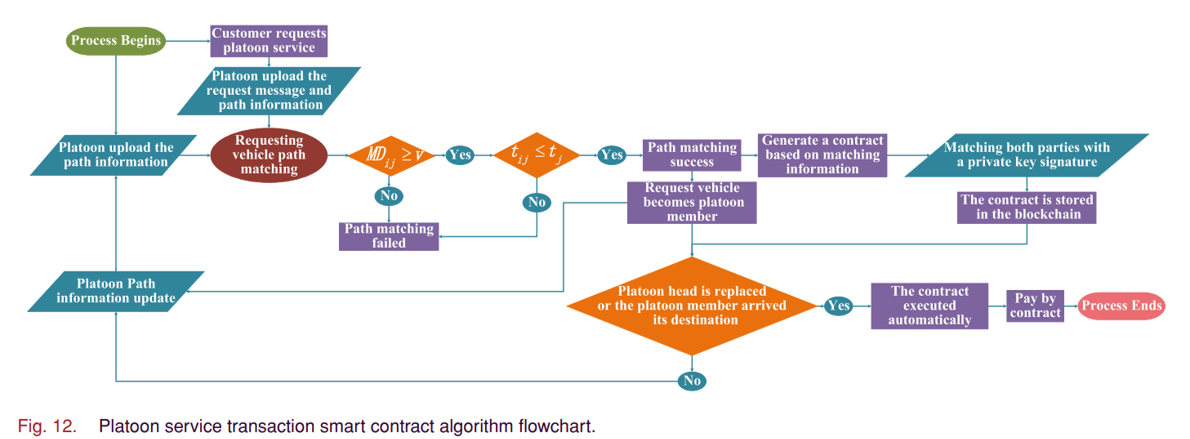
总体流程图
- 本文链接:https://shinya754.github.io/2022/10/20/Smart-Contract-Based-Economical-Platooning-in-Blockchain-Enabled-Urban-Internet-of-Vehicles/
- 版权声明:本博客所有文章除特别声明外,均默认采用 许可协议。